ランドマークマップ(LAMA)に関する研究
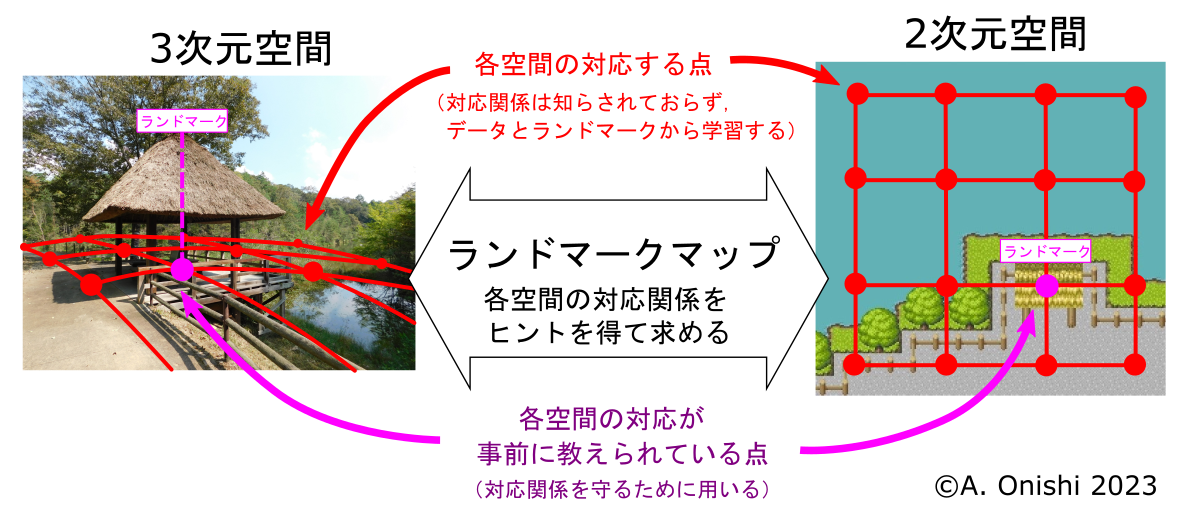
左図の風景から地図を作ることを考えましょう(注1). この時,写真中央に映っている屋根のある休憩所(東屋,あずまや)が特徴的ですので, 右図のように地図中央右下に位置するようにし,ほかはそれに合うように適当に調整することを考えます.
ここで「風景」は3次元空間を示しており,「地図」は2次元空間を示しています. 「地図を作る」は3次元空間と2次元空間の対応関係を作ることを指します. 「東屋を地図中央右下に位置するように」は3次元空間と2次元空間の対応関係のヒントを与えています.
ランドマークマップ(Landmark map; LAMA)は上記のような問題を解くためのニューラルネットワークです. ランドマークマップは高次元空間から低次元空間への対応関係を学習する手法です. その際,3次元空間と2次元空間の対応関係のヒント(ランドマーク)が与えられており, 「東屋を地図中央右下に位置するように」のようなユーザーの意図を一部反映して ほかの対応関係を学習します.
ランドマークマップはどのような場面で役立つのでしょう? 例えば加齢により手の可動範囲が狭くなったとき, 今の手の可動域(3次元空間)をコンピュータ画面(2次元空間)に割り当てて コンピュータを最大限活用することなどに応用することができるでしょう. ほかにも類似商品を提案する商品検索システムも作ることができるでしょう. 例えば,家電量販店で「ルンバのような製品が欲しい」といったように 我々は「~のような」と尋ね方をすることがあります. このような言い方は今日のキーワード検索には適さず, 絞り込み検索を代わりに使うことでしょう. しかしランドマークマップにあらゆる商品データの特徴を入力し, ルンバをランドマークとして地図中央に表示するようにすれば 関連する商品がルンバの近くに現れるようなシステムが作れるでしょう. このようにしてランドマークマップを用いて「ルンバのような製品が欲しい」 のような要望を聞くシステムを開発することができるでしょう.
【より詳細にランドマークマップの仕組みを学びたい方へ】
ランドマークマップは専門的な言い方をすると,
高次元空間上のデータの集合に対して多様体フィッティングを行い低次元空間への非線形写像を学習する手法の一種です.
学習の際に高次元空間と低次元空間の対応関係を保持する仕組みが備わっているところが特徴です.
詳細なアルゴリズムについては下記文献をお読みください.
A. Onishi, “Landmark map: An extension of the self-organizing map for a user-intended nonlinear projection,” Neurocomputing, vol. 388, pp. 228-245, May 2020
(注1)簡単のために「風景から」と書きましたが,3次元座標データ(x,y,0)が 対象となる範囲分だけ一定間隔で与えられていると考えてください. ランドマークマップは風景の画像データ1枚のみから地図を直接学習することは出来ません.